对于已经写入数字图像处理及机器视觉教科书多年的Sobel算子,谁也没曾追问和关心过它的发明背景和历史。最近,给学生上“光电图像处理”课,想介绍一下该算子的来历,查了很多文献,就是找不到原始文献。Google学术里搜索,信息很多,却不一致。有标注为期刊论文的,也有标注出版物析出的,出版时间也不一致(冈萨雷斯《Digital Image Processing》教材标注的时间为1970年)。
这个看似简单,但领域内科研、开发人员沿用了几十年的边缘检测算子,今天我才偶然发现一个帖子,该算子的提出者Irwin Sobel,多年后详细谈到了算子的由来和定义。
原来,这个著名的Sobel边缘算子,当年作者并没有公开发表过论文,仅仅是在一次博士生课题讨论会(1968)上提出("A 3x3 Isotropic Gradient Operator for Image Processing"),后在1973年出版的一本专著("Pattern Classification and Scene Analysis")的脚注里作为注释出现和公开的。
详细介绍,请参考以下内容。

History and Definition of the Sobel Operator
by Irwin Sobel
February 2, 2014
The work was never "published" by me... however it was first described and credited in a footnote "suggested by I. Sobel" in the book:
- Duda,R. and Hart,P., Pattern Classification and Scene Analysis, John Wiley and Sons,'73, pp271-2
The "suggestion" was made in a talk:
Sobel, I., Feldman, G., "A 3x3 Isotropic Gradient Operator for Image Processing", presented at the Stanford Artificial Intelligence Project (SAIL) in 1968.
There also a detailed historical account that I gave to
Prof. Per-Erik Danielsson
Institutionen for Systemteknik
Department of Electrical Engineering
Universitetet i Linkoping
S-581 83 Linkoping, Sweden
email: ped@isy.liu.se
which he kindly published as an appendix to a paper of his:
Danielsson, P.E., Seger, O., "Generalized and Separable Sobel Operators", in "Machine vision for three-dimensional scenes",
Herbert Freeman (ed), Academic Press (1990).
********************************************* correspondence follows *************************************
[Corrected by IES 15 Dec 94 - G' scale factor is 4 not 2]
February 6, 1989
Prof. Per-Erik Danielsson
Institutionen for Systemteknik
Department of Electrical Engineering
Universitetet i Linkoping
S-581 83 Linkoping
Sweden
Dear Prof. Danielsson, ...
The history of the "Sobel Operator" according to my best recollection is as follows:
In 1968, while a PhD candidate at the Stanford Artificial Intelligence Project I gave a talk, together with Gary Feldman (another graduate student and good friend of mine) on a relatively isotropic 3x3 gradient operator. This talk was presented at a time when the major piece of published work on computer vision was Larry Roberts' PhD Thesis from MIT wherein he defined a 2x2 gradient estimator then referred to as the "Roberts Cross" operator. I had previously thought up the operator via a line of reasoning presented in the accompanied short document and discussed it with Gary who enthusiastically proceeded to help me program it and test it. After doing so and satisfying ourselves that it gave at least visually desireable results, we presented these in a seminar at the Stanford Artificial Intelligence Project where we were employed as Research Assistants.
As this was an event that occurred more than 20 years ago my memory of it is somewhat foggy. Faculty that I most clearly remember in attendance at the seminar were Raj Reddy, John McCarthy and Arthur Samuels. I'm pretty sure that Peter Hart and/or Dick Duda and possibly Nils Nilsson from SRI were also there. Lester Earnest, project executive officer was most likely there. I'm pretty sure Karl Pingle who was employed as a project programmer and later wrote an edge follower incorporating the operator was there. Manfred Hueckel, a graduate student who later wrote a paper on a more robust and computationally expensive "edge detector", was I think also there. Lynn Quam, Jay "Marty" Tenenbaum, Gunnar Grape, Gil Falk, Dave Poole, and Phil Petit were other graduate students with the project and either were at the seminar or were working in such close proximity that they knew of the results.
My synopsis of what ensued was that Raj Reddy who was then teaching one of the first courses on Computer Vision coined the term "Sobel Operator" in contrast to the "Roberts Cross" and used it in his course. Subsequently Pingle published a paper (1969) describing it as part of his edge follower, and Duda and Hart mentioned it in their book.
In response to your gentle prod I polished up a note I had started to write several years ago for publication (I knew not where), giving my rationale for the derivation. I enclose it herewith with the request that you submit it as a technical/historical note with your forthcoming paper.
Sincerely,
Irwin Sobel
HPLABS, Measurement and Manufacturing Research Center
********************************************* difop note follows ********************************************
An Isotropic 3x3 Image Gradient Operators
by Irwin Sobel
We would like to document the derivation of a simple, computationally efficient, gradient operator which we developed in 1968. This operator has been frequently used and referenced since that time. The earliest description of this operator in the computer vision literature is [1], although it has been more widely popularized by its appearance in [2]. Horn [3] defines this operator and references 4 numerical analysis texts [4-7] with the statement:
"Numerical analysis [4-7] teaches us that for certain classes of surfaces an even better estimate is obtained using a weighted average of three such central differences ... These expressions produce excellent estimates for the components of the gradient of the central point".
The motivation to develop it was to get an efficiently computable gradient estimate which would be more isotropic than the then popular "Roberts Cross" operator [8]. The principle involved is that of estimating the gradient of a digitized picture at a point by the vector summation of the 4 possible simple central gradient estimates obtainable in a 3x3 neighborhood. The vector summation operation provides an averaging over directions-of-measurement of the gradient.
If the density function was truly planar over the neighborhood all 4 gradients would have the same value. Any differences are deviations from local planarity of the function over the neighborhood. The intent here was to extract the direction of the "best" plane although no attempt was made to make this rigorous.
To be more specific, we will refer here to the image function as a "density" function. (It could just as well be an "intensity" function - the difference depends on the physical nature of the image source.) For a 3x3 neighborhood each simple central gradient estimate is a vector sum of a pair of orthogonal vectors. Each orthogonal vector is a directional derivative estimate multiplied by a unit vector specifying the derivative's direction. The vector sum of these 4 simple gradient estimates amounts to a vector sum of the 8 directional derivative vectors.
Thus for a point on a Cartesian grid and its eight neighbors having density values as shown
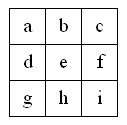
We define the magnitude of the directional derivative estimate vector 'g' for a given neighbor as
|g| = <density difference>/<distance to neighbor>
The direction of 'g' will be given by the unit vector to the appropriate neighbor. Notice that the neighbors group into antipodal pairs: (a,i) (b,h) (c,g) (f,d). Vector summing derivative estimates within each pair causes all the "e" values to cancel leaving the following vector sum for our gradient estimate:
G = (c-g)/4 * [ 1, 1]
+(a-i)/4 * [-1, 1]
+(b-h)/2 * [ 0, 1]
+(f-d)/2 * [ 1, 0]
The resultant vector being
G = [(c-g-a+i)/4 + (f-d)/2, (c-g+a-i)/4 + (b-h)/2]
Notice that the square root fortuituously drops out of the formula. If this were to be metrically correct we should divide result by 4 to get the average gradient. However, since these operations are typically done in fixed point on small integers and division loses low order significant bits, it is convenient rather to scale the vector by 4, thereby replacing the "divide by 4" (doubleshift right) with a "multiply by 4" (doubleshift left) which will preserve low order bits. This leaves us with an estimate which is 16 times as large as the average gradient. The resultant formula is:
G' = 4*G = [c-g-a+i + 2*(f-d), c-g+a-i + 2*(b-h)]
It is useful to express this as weighted density summations using the following weighting functions for x and y components:

x-components x-components
This algorithm was used as an edgepoint detector in the 1968 vision system [2] at the Stanford Artificial Intelligence Laboratory where in a point was considered an edgepoint if and only if
|G'|**2 > T
where T was a previously chosen threshold. For this purpose it proved an economical alternative to the more robust, but computationally expensive "Hueckel operator" [9].
References:
[1] Pingle, K.K., "Visual Perception by a Computer", in Automatic Interpretation and Classification of Images, A. Grasselli (Ed.), Academic Press, New York, 1969, pp. 277-284.
[2] Duda, R.O. and Hart, P.E., pp. 271-272 in Pattern Classification and Scene Analysis, John Wiley & Sons, New York, 1973
[3] Horn,B.K.P., "Hill Shading and the Reflectance Map", Originally in Proc. DARPA Workshop in Image Understanding, Apr 24-25,1979, p. 85 Science Applications Inc. Report SAI-80-895-WA; Later in Geo- Processing 2(1982) p. 74, Elsevier Scientific Publishing, Amsterdam.
[4] Conte,D. and de Boor, C., Elementary Numerical Analysis, 1972, New York: McGraw Hill.
[5] Hamming, R.W., Numerical Methods for Scientists and Engineers, 1962, New York: McGraw Hill.
[6] Richtmeyer, R.D. and Morton, K.W., Difference Methods for Initial-Value Problems, New York: John Wiley pp.136-143.
[7] Hildebrand, F.B., Introduction to Numerical Analysis, 1956, 1974 New York: McGraw Hill.
[8] Roberts, L. G., "Machine Perception of Three-Dimensional Solids," in Optical and Electro-Optical Information Processing, pp. 159-197, J. T. Tippett, et al., (Ed.'s), MIT Press, Cambridge, Mass., 1965.
[9] Hueckel, M.H., "An Operator which Locates Edges in Digitized Pictures" in Journal of the Association of Computing Machinery, Vol.18,No. 1, January 1971, pp. 113-125.
************************************ end of correspondence **************************************
更多阅读:An Isotropic 3x3 Image Gradient Operators